G5U-PH/S5U-PHЪжЛњМЄЙтИЩЩцвЧЩЯКЃЧЌъзЙтбЇПЦММгаЯоЙЋЫО
вЛЁЂвЧЦїЙцИёВЮЪ§
G5U-PHМЄЙтИЩЩцвЧЪЧG10U-PHЕФИпЗжБцТЪЩ§МЖАцЃЌЮЊ3DЦСМАШЋУцЦСЩуЯёПзМьВтЖјЖЈжЦЃЌПЩвдТњзуИќДѓЕФЭИЙ§ВЈЧАPVжЕЕФВтСПЁЃ
вЧЦїЙцИёВЮЪ§Бэ
гВМўВПЗжЃК
| ВњЦЗаЭКХ | G5U-PH |
| ВњЦЗУћГЦ | 5mmе§СЂЪНМЄЙтИЩЩцвЧ |
| ВтЪдПкОЖ | Φ5mm |
| ИЈжњЖдзМПкОЖ | Φ30mm |
| БъзМОЕУцаЮОЋЖШ | λ/20 |
| ЙтдД | НјПкHe-NeМЄЙтЦїЃЈ632.8nm) |
| ЙтТЗЧаЛЛ | ИЈжњЙлВьЃЈΦ30mmДѓЪгГЁЃЉгыВтЪдЃЈΦ5mmаЁЪгГЁЃЉФЃЪНЕчПиЧаЛЛ |
| ЕчдД | AC220V50HZ |
ШэМўВПЗжЃК
| ШэМўУћГЦ | вЦЯрЫуЗЈЃЈМђГЦPHЃЉ |
| ЗжЮіЯюФП | ЭИЙ§ВЈЧАPVжЕЁЂЦНааЖШTiltжЕЕШ |
| ВтЪджиИДад | PVЃК0.01λ RMS:0.003λ |
| ВтЪддЪаэЮѓВю | PV<1λЪБ PVЃК0.05λ TiltЃК0.2frЃЈСуГЁЕїећЮЊ1ИљЬѕЮЦЃЉ 1λ<PV<2λЪБ PVЃК0.1λ TiltЃК0.5frЃЈСуГЁЕїећЮЊ1ИљЬѕЮЦЃЉ 2λ<PV<3λЪБ PVЃК0.2λ TiltЃК1frЃЈСуГЁЕїећЮЊ1ИљЬѕЮЦЃЉ |
| ВтЪдЪБМф | 1.5~2Уы |
| ВњЦЗаЭКХ | S5U-PH |
| ВњЦЗУћГЦ | 5mmе§СЂЪНМЄЙтИЩЩцвЧ |
| ВтЪдПкОЖ | Φ5mm |
| ИЈжњЖдзМПкОЖ | Φ30mm |
| БъзМОЕУцаЮОЋЖШ | λ/20 |
| ЙтдД | НјПкАыЕМЬхМЄЙтЦїЃЈ635nm) |
| ЙтТЗЧаЛЛ | ИЈжњЙлВьЃЈΦ30mmДѓЪгГЁЃЉгыВтЪдЃЈΦ5mmаЁЪгГЁЃЉФЃЪНЕчПиЧаЛЛ |
| ЕчдД | AC220V50HZ |
| ШэМўУћГЦ | вЦЯрЫуЗЈЃЈМђГЦPHЃЉ |
| ЗжЮіЯюФП | ЭИЙ§ВЈЧАPVжЕЁЂЦНааЖШTiltжЕЕШ |
| ВтЪджиИДад | PVЃК0.01λ RMS:0.003λ |
| ВтЪддЪаэЮѓВю | PV<1λЪБ PVЃК0.05λ TiltЃК0.2frЃЈСуГЁЕїећЮЊ1ИљЬѕЮЦЃЉ 1λ<PV<2λЪБ PVЃК0.1λ TiltЃК0.5frЃЈСуГЁЕїећЮЊ1ИљЬѕЮЦЃЉ |
| ВтЪдЪБМф | 1.5~2Уы |

AK-40ГЇМлжБЯњМЄЙтИЩЩцвЧЃЌБуаЏЪНИЩЩцвЧЃЌИпОЋЖШМЄЙтИЩЩцвЧЃЌгХжЪМЄЙтИЩЩцвЧAK-40
| ХфжУЗНЪН | |
| СЂЪНЁЂЮдЪНХфжУ ЦНУцзмГЩЃЌЧђУцзмГЩ ОВЬЌВтСПЃЌЯрЮЛвЦЕїжЦВтСП | |
| ИНМў | |
| БъзМЦНУцКЭЧђУцВЮееОЕ гыZYGOTMВЮееОЕЯрШн БъзМЫЅОЕ ИЩЩцвЧжЇГХ/ЕїећгУЫФНХзљ ЫЎЦНЮхжсЕїећзљ | |
| IntelliWave TMЗжЮі | |
| Windows XPЯЕЭГ ИЩЩцЬѕЮЦОВЬЌгыЯрЮЛвЦЕїжЦЗжЮі ЭъећЕФЗжЮіЙЄОпЃЌАќРЈЭГМЦзЪСЯЁЂЯёВю ШЦЩфЗжЮіЁЂгАЯёМгЙЄЁЂвдМАМИКЮгАЯёзЊЛЛ ИЩЩцЭМзЊЛЛГЩЙтбЇЃЈOPDЃЉЛђБэУцЕиЭМЃЈsurface mapЃЉ здЖЏЗДИДВтСПЛђздЖЏЛЏЗжЮіЙІФм ЯрЛЅСЌНгLab VIEW ЁЂResearch Systems IDL ЁЂMath WorkЁЂMatlabКЭMicrosoft ExcelШэМў 1 ЗфЙШжЕЃЈPV ЃЌPeak-to-ValleyЃЉ ЪЧШЁЕУГЄЖШЩЯЃЌВтСПИпЖШзюИпЕугызюЕЭЕуМфЕФОрРы 2 ОљЗНИљжЕЃЈRMSЃЌRoot-Mean-SquareЃЉЪЧШЁбљГЄЖШЩЯЃЌОрРыИпЖШжааФЯпЕФОљЗНИљЦЋВюжЕЁЃ 3 Ш§ЦНУцМьЖЈЗНЃЈ3-Flat Test ЃЉзюЪЙгУШ§ИіЦНУцВЮееОЕЯрЛЅМьВтЕФВтСПЗНЪНЁЃ 4 жиИДадЃЈRepeatabilityЃЉЕФЖЈвхЃКЖдЯрЭЌЕФзщМўНјаа100ДЮСПВтЃЌЖјУПзщСПЪ§ОнЪЧгЩ20ИіЪ§ОнЦНОљКѓШЁЕУЃЌ100зщВтЪ§ОнЭГМЦЗжЮіЃЌЖЈвхжиИДадМДЪЧвЛИіБъзМВюжЕЁЃ | |
| аЭКХ | AK-40 Fizeau type |
| МЄЙтЙтдД | |
| ВЈГЄ/ ЙІТЪ | He-Ne ,632.8nm , 0.7mw |
| ВтСПЙтЪјжБОЖ | 15гЂДчЃЈ38mmЃЉ |
| ЦЋеёад | дВЦЋеёЖЏЃЈCircular PolarizationЃЉ |
| ЯрИЩГЄЖШ | ЃО100ЙЋГп |
| ПижЦЗНЪН | |
| ЙлВьЕїећ | 4On/off ПЊЙи |
| БфНЙ | а§зЊЖШХЬ |
| ЖдНЙЕїећ | а§зЊХЅ |
| ЙтЧПЕїећ | а§зЊХЅ |
| ФЃЪНЧаЛЛ | ЪжЖЏЧаЛЛ |
| Йт бЇ ВП Зж | |
| БфНЙЗЖЮЇ | 1X—6X |
| ЖдзМЕїећ | ЖўЕуЕїећ |
| ЙлВьЕїећНЧ | ±1.8ЖШ |
| дЄШШЪБМф | ЃМ 30Зжжг |
| ЪгЦЕЙцИё | |
| ЩуЯёЛњ | RS170ЃЌ 640X480ЯёЫи |
| ЯдЪОЦї | МЦЫуЛњКЌLCDЦСФЛЛђЪгЦЕМрЪгЦї |
| ЕчЦјВПЗн | |
| Еч дД | 110/240 Volts ,50/60Hz ЃЈ50 wattsЃЉ |
| ЛњаЕВПЗн | |
| ГпДч | 120*120*250mm |
| жиСП | 6 kg |
| ВтСПадФмЃЈгІгУ IntelliWAare TMШэМўСПНсЙћЃЉ | |
| ЯЕЭГзМШЗЖШЃЈШ§ЦНУцМьЖЈЗЈЃЉЃЈ3ЃЉ | λ/100 , ЗхЙШжЕЃЈ1ЃЉ |
| ЗхЙШжЕжиИДадЃЈ4ЃЉЃЈPV RepeatabilityЃЉ | λ/3 00 , ЗхЙШжЕЃЈ1ЃЉ |
| ОљЗНжЕжиИДадФмЃЈ2ЃЉЃЈ4ЃЉЃЈRMS RepeatabilityЃЉ | λ/2,000 |
| ИЩЩцЬѕЮЦНтЯёЖШЃЈFringe Resolution ЃЉ | 180Ьѕ |
РзФсЩмМЄЙтИЩЩцвЧ
SJ6000МЄЙтИЩЩцвЧ
SJ6000ВЩгУИпЮШЦЕКЄФЪМЄЙтЦїЁЂМЄЙтЫЋзнФЃШШЮШЦЕММЪѕЁЂИпОЋЖШЛЗОГВЙГЅФЃПщЁЂ МИКЮВЮСПИЩЩцЙтТЗЩшМЦЁЂИпОЋЖШМЄЙтИЩЩцаХКХДІРэЯЕЭГЁЂИпадФмМЦЫуЛњПижЦЯЕЭГММЪѕЃЌЪЕЯжИїжжВЮЪ§ЕФИпОЋЖШВтСПЁЃЭЈЙ§МЄЙтШШЮШЦЕПижЦММЪѕЃЌЪЕЯжПьЫй(5~10 Зжжг)ЁЂИпОЋЖШ(0.05ppm)ЁЂПЙИЩШХФмСІЧПЁЂГЄЦкЮШЖЈадКУЕФМЄЙтЦЕТЪЪфГіЃЌВЩгУВЛЭЌЕФЙтбЇОЕзщгыМЄЙтХфКЯЃЌЕУЕНВЛЭЌЕФИЩЩцаХКХЃЌШЛКѓЭЈЙ§ИпОЋЖШМЄЙт ИЩЩцаХКХДІРэЯЕЭГЕУЕНИЩЩцЪ§ОнЃЌНЋЪ§ОнЭЈЙ§МЦЫуЛњНјааЯдЪОКЭЖЏЬЌЗжЮіЁЃ
ЪЙгУЪБЃЌВйзїепЯШАДееЩшМЦЕФМИКЮЙтТЗАВзАЯрХфКЯЕФОЕзщЃЌМИКЮЙтТЗЪЧвдТѕПЫЖћбЗаЭМЄЙтИЩЩцвЧдРэЮЊЛљДЁЩшМЦЕФЃЌЯТЭМЪЧТѕПЫЖћбЗИЩЩцвЧЕФЛљБОдРэЭМЃК

ТѕПЫЖћбЗИЩЩцвЧЕФдРэЪЧвЛЪјШыЩфЙтЗжЮЊСНЪјКѓИїздБЛЖдгІЕФЦНУцОЕЗДЩфЛиРДЃЌетСНЪјЙтДгЖјФм ЙЛЗЂЩњИЩЩцЁЃИЩЩцжаСНЪјЙтЕФВЛЭЌЙтГЬПЩвдЭЈЙ§ЕїећИЩЩцБлГЄЖШвдМАИФБфНщжЪЕФелЩфТЪРДЪЕЯжЃЌДгЖјаЮГЩВЛЭЌЕФИЩЩцЭМбљЁЃИЩЩцЬѕЮЦЪЧЕШЙтГЬВюЕуЕФЙьМЃЃЌвђДЫЃЌвЊ ЗжЮіФГжжИЩЩцВњЩњЕФЭМбљЃЌБиЧѓГіЯрИЩЙтЕФЙтГЬВюЮЛжУЗжВМКЏЪ§ЁЃ
ДюНЈКУМИКЮЙтТЗКѓЃЌдкМьЖЈШэМўЩЯЩшЖЈВтСПЕФПЊЪМЁЂНсЪјЮЛжУЃЌЕуЛї“ПЊЪМ”АДХЅЃЌШэМўНчУцЛсЪЕЪБЯдЪОВтСПЫљЕУЖЏЬЌЪ§ОнЃЛЩЈУшНсЪјКѓЃЌВйзїепПЩЭЈЙ§ЖдВтСПЫљЕУ Ъ§ОнЧњЯпНјааЗжЮіЃЌЕУЕНШчГЄЖШЁЂНЧЖШЁЂжБЯпЖШЁЂДЙжБЖШЁЂЦНУцЖШЕШВЮЪ§ЁЃВЂИљОнЯЕЭГФкжУЕФМьВтБъзМЖдБЛВтМўЕФИїЯюВЮЪ§НјааКЯИёХаЖЈЃЌМьВтНсЪјКѓздЖЏЩњГЩМьЖЈ НсЙћЁЃ
ЖўЁЂЬиЕугХЪЦШ§ЁЂММЪѕВЮЪ§| 1 | ЯпадВтГЄОрРы | 40m |
| 2 | ЯпадВтГЄОЋЖШ | ±ЃЈ0.02+0.5LЃЉum |
| 3 | МЄЙтЮШЦЕОЋЖШ | 0.05ppm |
| 4 | ЗжБцТЪ | 0.001um |
| 5 | *ДѓВтСПЫйЖШ | 4.0m/S |
| 6 | ЖЏЬЌВЩМЏЦЕТЪ | 50KHZ |
| 7 | дЄШШЪБМф | 5~10Зжжг |
| 8 | ЛЗОГВЙГЅОЋЖШ | ПеЦјбЙСІЃК±1.0mBarЃЌ ПеЦјЪЊЖШЃК±6%ЃЌ ВФСЯЮТЖШЃК±0.1Ёц |
| 9 | ЛљБОжиСП(КЌШ§НХМмЃЌАќзА) | 15Kg |
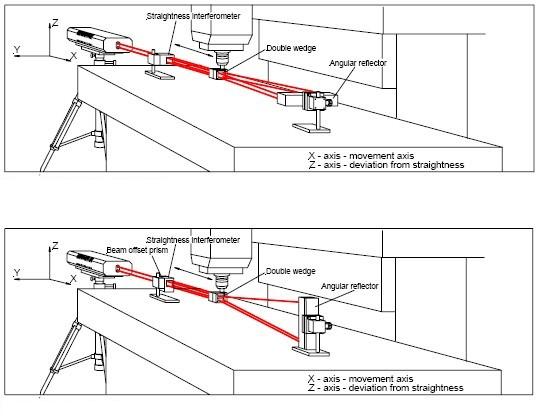 вдЩЯЮЊжБЯпЖШВтСПЪОвтЭМЃЌАќРЈЫЎЦНЗНЯђжБЯпЖШКЭДЙжБЗНЯђжБЯпЖШ
вдЩЯЮЊжБЯпЖШВтСПЪОвтЭМЃЌАќРЈЫЎЦНЗНЯђжБЯпЖШКЭДЙжБЗНЯђжБЯпЖШ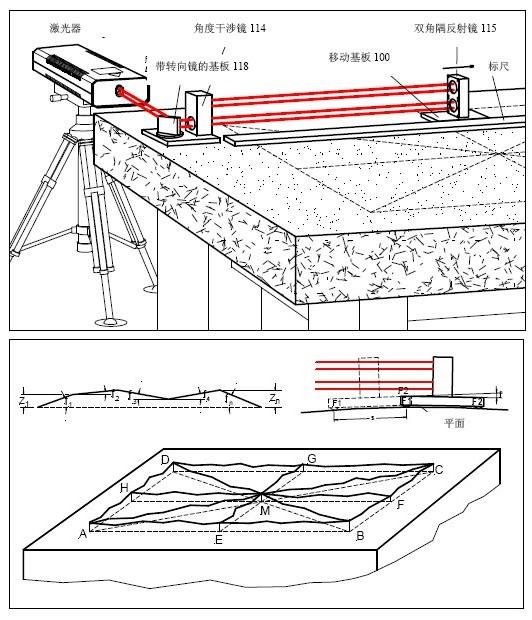 вдЩЯЪЧЦНУцЖШВтСПЪОвтЭМ
вдЩЯЪЧЦНУцЖШВтСПЪОвтЭМ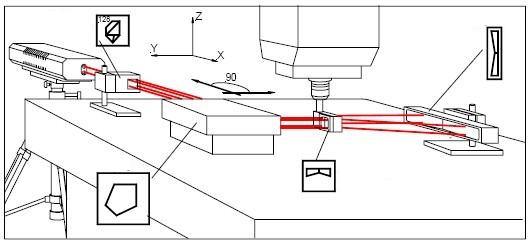 вдЩЯЪЧДЙжБЖШВтСПЪОвтЭМ
вдЩЯЪЧДЙжБЖШВтСПЪОвтЭМ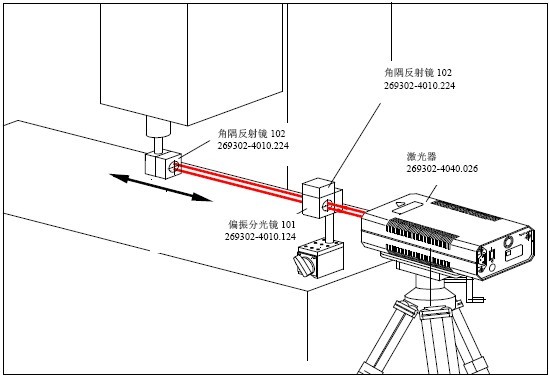 вдЩЯЪЧЮЛвЦЁЂЯпадЖШЁЂЫйЖШЁЂМгЫйЖШЁЂЖЈЮЛОЋЖШВтСПЪОвтЭМ
вдЩЯЪЧЮЛвЦЁЂЯпадЖШЁЂЫйЖШЁЂМгЫйЖШЁЂЖЈЮЛОЋЖШВтСПЪОвтЭМ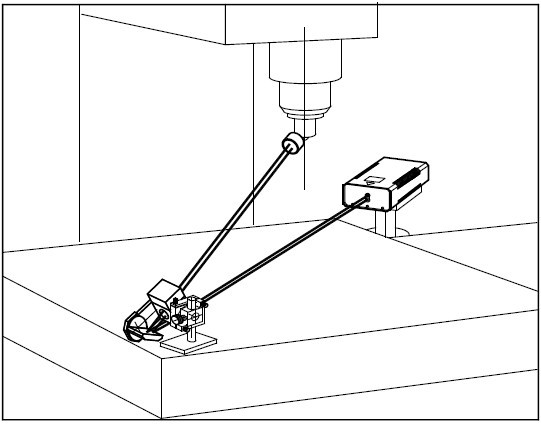 вдЩЯЪЧЖдНЧВтСПЪОвтЭМ
вдЩЯЪЧЖдНЧВтСПЪОвтЭМ вдЩЯЪЧИЉбіНЧВтСПЪОвтЭМ
вдЩЯЪЧИЉбіНЧВтСПЪОвтЭМ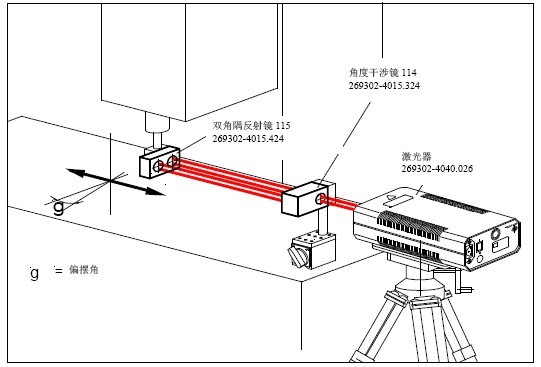 вдЩЯЪЧЦЋАкНЧВтСПЪОвтЭМ
вдЩЯЪЧЦЋАкНЧВтСПЪОвтЭМ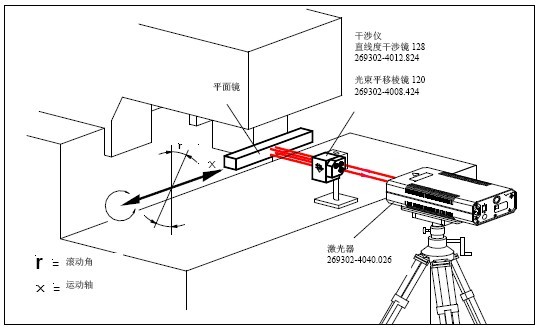 вдЩЯЪЧЙіЖЏНЧВтСПЪОвтЭМ
вдЩЯЪЧЙіЖЏНЧВтСПЪОвтЭМ вдЩЯЪЧЛизЊЬЈЖЈЮЛОЋЖШВтСПЪОвтЭМ
вдЩЯЪЧЛизЊЬЈЖЈЮЛОЋЖШВтСПЪОвтЭМ вЎФУЖћЫЋЦЕМЄЙтИЩЩцвЧбљБОЃЈжаЮФЃЉ.pdf
вЎФУЖћЫЋЦЕМЄЙтИЩЩцвЧбљБОЃЈжаЮФЃЉ.pdf